the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 07 Nov 2018
| 07 Nov 2018
Modelling of ships as a source of underwater noise
Jukka-Pekka Jalkanen
Lasse Johansson
Mattias Liefvendahl
Rickard Bensow
Peter Sigray
Martin Östberg
Ilkka Karasalo
Mathias Andersson
Heikki Peltonen
Jukka Pajala
In this paper, a methodology is presented for modelling underwater noise emissions from ships based on realistic vessel activity in the Baltic Sea region. This paper combines the Wittekind noise source model with the Ship Traffic Emission Assessment Model (STEAM) in order to produce regular updates for underwater noise from ships. This approach allows the construction of noise source maps, but requires parameters which are not commonly available from commercial ship technical databases. For this reason, alternative methods were necessary to fill in the required information. Most of the parameters needed contain information that is available during the STEAM model runs, but features describing propeller cavitation are not easily recovered for the world fleet. Baltic Sea ship activity data were used to generate noise source maps for commercial shipping. Container ships were recognized as the most significant source of underwater noise, and the significant potential for an increase in their contribution to future noise emissions was identified.
- Article
(1719 KB) -
Supplement
(484 KB) - BibTeX
- EndNote





It is recognized that anthropogenic noise might have adverse effects on the marine environment. Scientific results unequivocally suggest that animals react to sound – sometimes with devastating results (Rolland et al., 2012; Yang et al., 2008), but more commonly sound gives rise to strong avoidance reactions (Moore et al., 2012). Not all marine life is sensitive to the same kind of noise; low-frequency shipping noise (<1000 Hz) may be relevant for several fish species, whereas this range may be less relevant for marine mammals that can hear sounds up to 200 kHz (Nedwell et al., 2004). The issue of underwater noise has been recognized by the European Commission (EC), which included sound as “Descriptor 11” in the Marine Strategy Framework Directive (MSFD) and made it analogous to pollution (European Parliament and Council of the European Union, 2008). Global maps of shipping activity help to understand that the omnipresence of waterborne traffic means that ships will contribute to the noise levels of all marine areas. The levels of underwater sound have been increasing since the advent of steam-driven ships (Hildebrand, 2004, 2009); however, shipping is only one source of underwater noise and both natural and anthropogenic sources contribute to noise levels.

Figure 1Predicted and actual main engine masses of 31 500 four-stroke engines. The black lines represent the range given by Watson (1998). The red line indicates the mass/power dependency used in this study for cases where engine mass could not be determined.
The primary source of underwater noise from ships is propeller cavitation. Cavitation occurs when a fast rotating propeller pushes water with its blades and a low pressure zone forms on the backside of the blade. Water boils and forms collapsing bubbles which violently burst, emitting noise in the process. All propellers cavitate when rotated fast enough, but propeller design can affect how easily this occurs. The issue with this is that efficient propulsion and the suppression of cavitation are two conflicting requirements. Currently design rules (IMO, 2014) exist regarding the energy efficiency of new ships, but no binding regulation has been put forward to mitigate underwater noise from ships (IMO, 2013). Therefore, it is easy to understand that designing an efficient propeller is more important than designing a quiet propeller, unless a low noise signature is required on the battlefield (warships), or for the purpose of not disturbing test subjects (research vessels) (Leaper et al., 2014).
Modelling underwater noise from ships has been carried out for a long period of time, and various models have been designed to describe noise sources based on measurements made since the Second World War. However, these models often rely on confidential data sets, which are not necessarily available for civilian research efforts. Nevertheless, over the last two decades significant effort has been made to generate an experimental basis for noise model development (Arveson and Vendittis, 2000; Kipple, 2002; McKenna et al., 2012; Wales and Heitmeyer, 2002). These data have been used to construct noise source models, which rely on a parametric description of ensemble source spectra for merchant vessels. Recently, Wittekind (2014) described noise sources using a method that presents ships as individual sources of noise which arise from individual technical features and vessel operation.
Automatic Identification System (AIS) data have been used to track exhaust emissions from ship traffic, but their use in underwater noise source modelling has only been the subject of few studies where they have mostly been used to locate noise sources relative to hydrophone setups (Hatch et al., 2008; McKenna et al., 2012). Our study extends on this idea and builds on the development of the Ship Traffic Emission Assessment Model (STEAM; Jalkanen et al., 2009, 2012; Johansson et al., 2013, 2017). This approach combines the vessel level technical description, an existing noise source model (Wittekind, 2014) and ship activity obtained from AIS data; furthermore, it facilitates the regular updates of noise source maps of any level, ranging from local to global, depending on the availability of AIS data. These data could be used to assess shipping noise, further the understanding of noise as an environmental stressor and provide tools for future sustainable governance of marine areas.
The aim of this paper is to (a) introduce a methodology for noise source mapping, which could be used for routine annual reporting of underwater noise emissions, (b) provide insight into the geographical distribution of vessel noise in the Baltic Sea region and (c) provide a summary of results for noise emissions from Baltic Sea shipping during 2015.
2.1 Ship Traffic Emission Assessment Model
The Ship Traffic Emission Assessment Model (STEAM; Jalkanen et al., 2009, 2012; Johansson et al., 2013, 2017) was used in this study. The Wittekind noise source model (Wittekind, 2014) was built into STEAM which facilitated noise source descriptions based on the technical characteristics of individual vessels. The selection of the noise model for implementation was based on the performance of the model, the availability of the technical data required for proper implementation and separate descriptions of high- and low-frequency contributions to source levels. Furthermore, the Wittekind model is based on measurements that were made for a modern vessel fleet. Conceptual modelling using AIS to describe vessel activity and technical data to describe the vessel features is independent of the choice of the source model.
The activity data used for this study consisted of 500 million AIS position reports sent by ships sailing the Baltic Sea during the year 2015. The data were provided by the member states of the Helsinki Commission (HELCOM). STEAM uses AIS to describe vessel location, time, identity and speed over ground and combines these data with vessel technical data from IHS Fairplay (IHS_Global, 2016) and publicly available shipping data sources (classification societies, engine manufacturers). This combination allows for predictions of instantaneous engine power, fuel consumption and emissions as a function of vessel speed. Further details regarding the model can be found in a recent paper by Johansson et al. (2017).
2.2 Wittekind noise source model
The Wittekind noise source model describes ship noise as a combination of three contributions, which arise from low- and high-frequency cavitation and machinery noise. These noise sources are linked to vessel properties, such as displacement, hull shape and machinery specifications, which is in contrast with some previously introduced ship noise models (McKenna et al., 2012; Wales and Heitmeyer, 2002). The cavitation contributions are dependent on vessel speed, whereas the machinery contribution is not. This has important implications for the noise source map generation and the time integration components of this work, which will be described in Sect. 2.6. The three components are described by Wittekind as
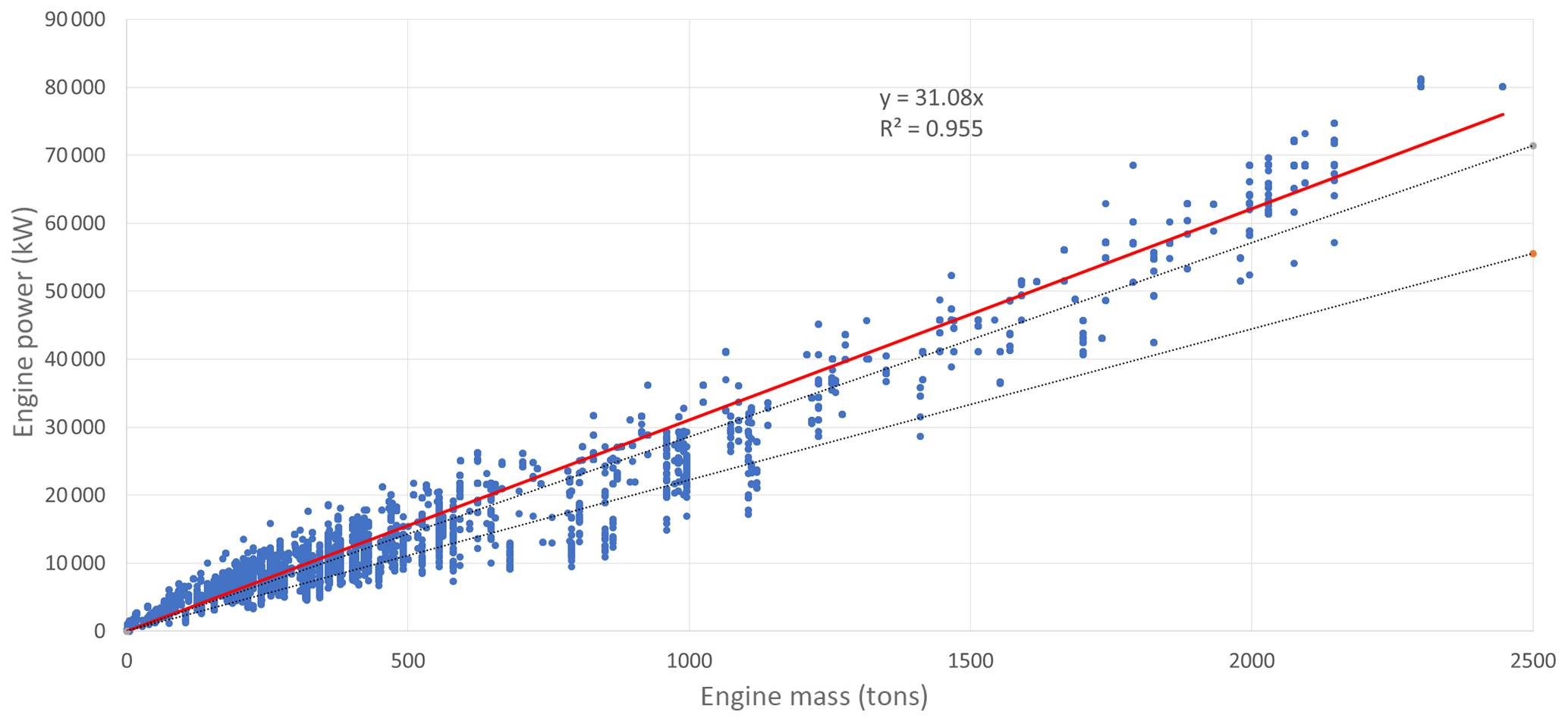
Figure 2Predicted and actual main engine masses of 24 000 two-stroke engines. The black lines represent the range given by Watson (1998). The red line indicates the mass / power dependency used in this study.
In Eq. (1) fk is the centre frequency of the kth frequency band. The SL1 (Eq. 2) represents the low-frequency cavitation noise, the second contribution (SL2; Eq. 3) describes the high-frequency cavitation noise and the third (SL3; Eq. 3) represents the machinery noise. In the Wittekind model, the low-frequency cavitation noise (SL1) was obtained from fitting to experimental data (Arveson and Vendittis, 2000):
In Eq. (2), f denotes the centre frequency of the kth octave band; c0=125, c1=0.35, , c, and are constants; CB denotes the block coefficient (hull form fullness when compared to a rectangular box of same length, width and depth as the ship); V indicates the instantaneous vessel speed obtained from AIS; Vc represents the cavitation inception speed; ∇ is the vessel displacement; and ∇Ref is the reference vessel displacement, which is 10 000 t. In Eq. (4), the parameters m and n represent the mass (in tonnes) and the number of operating main engines, respectively, and E is the engine mounting parameter which indicates whether the engine is resiliently (E=0) or rigidly (E=15) mounted.
As can be seen, the Wittekind model uses parameters that are ship specific and which lead to individual noise source descriptions depending on vessel features; however, some of these parameters are not available from the ship databases that provide other vessel specifications. Nevertheless, there are numerous parameters that need to be derived during the noise source calculations. Some of these, such as cB, ∇ and n, are already calculated during a regular STEAM run, but engine mass (m), mounting parameter (E) and cavitation inception speed (VCIS) were determined as described in Sect. 2.3, 2.4 and 2.5.
2.3 Main engine mass
Main engine mass is not routinely included in commercial ship databases; therefore, we have augmented the STEAM database with engine masses obtained from technical documentation from engine manufacturers and engine catalogues (Barnes et al., 2005). Engine mass could be explicitly determined for about two-thirds of the global fleet. For the third, a linear function was developed to estimate the engine mass based on the size (installed power) of engines. For four-stroke engines, the main engine mass was determined by multiplying the installed kW / engine by 0.0155 which corresponds to a 65 kW t−1 power ∕ mass ratio and falls within the range of values proposed by Watson (1998). Cylinder arrangement (in-line vs. V arrangement) also has an impact on the predicted mass, as in-line engines tend to be heavier than V engines; this leads to a lower power / mass correlation than for two-stroke engines. Cylinder arrangement does not apply to two-stroke engines, because only in-line engines are used.
There were about 19 600 vessels equipped with four-stroke engines in this study, the mass of which was evaluated with the proposed power / mass methodology. The quality of the linear fit is slightly worse for four-stroke engines (R2=0.814) than for two-stroke engines (R2=0.955) due to the variable cylinder arrangement described above. There were 24 300 vessels with two-stroke engines, the mass of which could be determined from manufacturer documentation. The mass of two-stroke main engines for 5500 ships needed to be estimated based on the installed engine power (in kW). Further, there were 3100 vessels for which the engine stroke type was unknown. In unknown cases, the most similar vessel details (Johansson et al., 2017) were used to determine the missing technical data.
For two-stroke engines, the engine power output was multiplied with 0.0322 (red line). For example, the predicted mass of the MAN B&W 10K98MC-C engine is 1725–1797 t, whereas manufacturer specifications indicate a mass of 1854 t. Watson recommends 0.035–0.045 t kW−1 (upper and lower black lines of Fig. 2); however, it should be noted that the range recommended by Watson (1998) leads to higher engine masses than the best fit to the engine setup of the current fleet of 24 300 samples.
For gas turbine machinery, 0.001 t kW−1 should be used according to Watson. There are 480 entries in the ship database that indicate the use of turbine machinery, either gas or steam versions. The accuracy of mass predictions for vessels equipped with turbine machinery is poor. No correlation was found between the engine mass and the power output. The Watson recommendation was adopted and 0.001 t kW−1 was used for all turbine machinery. It should be noted that the applicability of the Wittekind noise source model to turbine machinery is an extrapolation of the original results and is likely to result in large uncertainties.
2.4 Engine mounting
Unfortunately, an engine mounting parameter is not available in the existing technical databases. The main engines of a ship can be bolted directly to the rigid box girder without additional damping material to absorb vibrations of engines. This is known as rigid mounting and is usually applied to large two-stroke engines, but it can also be used for some large four-stroke engines. Resilient mounting of the engine, in comparison, is used if it is necessary to reduce structure-borne vibrations or noise that would otherwise be transmitted to the hull. According to Rowen (2003) and Kuiken (2008), resilient mounting is usually applied to medium- and high-speed diesels, which are sufficiently rigid with respect to bending and torsion. In this work, all two-stroke engines have been assigned a “rigid mounting” status, whilst “resilient mounting” is assumed for all four-stroke engines, although, as previously stated, some four-stroke engines can be installed using either method (Wartsila, 2012, 2015 2016). We investigated the impact of these assignments on the emitted noise levels from several kinds of ships. Source level curves for some of these cases can be found in Supplement.
2.5 Cavitation inception speed
The description of cavitation is, among other factors, a function of the propeller disc area and the propeller tip speed. The commercial ship databases do not contain enough information regarding propellers installed on ships, such as the number of blades and diameter, to generate the cavitation inception speed. An alternative method of determining this parameter has consequently been developed founded on discussions with a manufacturer of propulsion equipment. Following these discussions, an approach based on the vessel block coefficient and design speed was developed (Eq. 5):
where VCIS is the cavitation inception speed (knots), CB is the block coefficient and Vd is the design speed of the vessel (knots). Between 9 and 14 knots the VCIS is a linear function of the block coefficient (hull shape). According to Eq. (5), all ships will cavitate at 14 knots: the fast RoPax, cruise ships and most modern container ships will fall into this end of the speed range. This contrasts with most bulk cargo carriers and tankers which have a VCIS close to 9 knots. Within these extremes there are various exceptions, such as very large container ships (over 18 000 TEU – twenty foot equivalent units – capacity) and new LNG carriers, which do not perform as well and have a lower inception speed than most ships of their type. It is unclear why this occurs, but there is a known trade-off between propeller efficiency and noise (Carlton, 2010). Therefore, if low noise emissions are not considered as a meaningful parameter during the design phase, the gradually tightening energy efficiency requirements for ships may lead to ships that are actually noisier than their predecessors. In addition, highly efficient propellers may not be the quietest ones.
2.6 Noise source map generation
To represent underwater noise emissions as a map, an approach was developed to facilitate this form of emission reporting. The source level is related to the power emitted (Pk) in the frequency band k, as follows:
where is a reference power, ρ and c are the density and speed of sound, respectively, while pref=1 µPa. Assuming that all noise sources are uncorrelated, the total emitted power from all M ships in area A at time t is given as
where Pk,m(t) is the sound power (in J s−1) emitted by ship m. This quantity is additive and facilitates the summation of ship specific noise energy over a specific period (in joules). The sound power map is more of a visual aid than a direct input data set for noise propagation modelling, which usually demands point source descriptions of the noise sources. For examples of propagation modelling from multiple ships, which facilitates the evaluation of the sound pressure level at an arbitrary point in the water column, the reader is referred to e.g. Karasalo et al. (2017) and Gaggero et al. (2015). Presenting sound energy as a geographically distributed quantity will help to visualize noisy areas, as has also been investigated by Audoly et al. (2015). Similar to the emission maps of atmospheric pollutants, noise source maps should not be taken as a representative description of underwater noise any more than an emission map of NOx is able to fully describe airborne pollutant concentrations. The maps presented in this work describe the noise sources, not the underwater propagation of noise. It should be noted that the numbers presented as a map are a function of grid cell area and should be normalized to unit area. In this work we have used one square kilometre as the grid cell size.
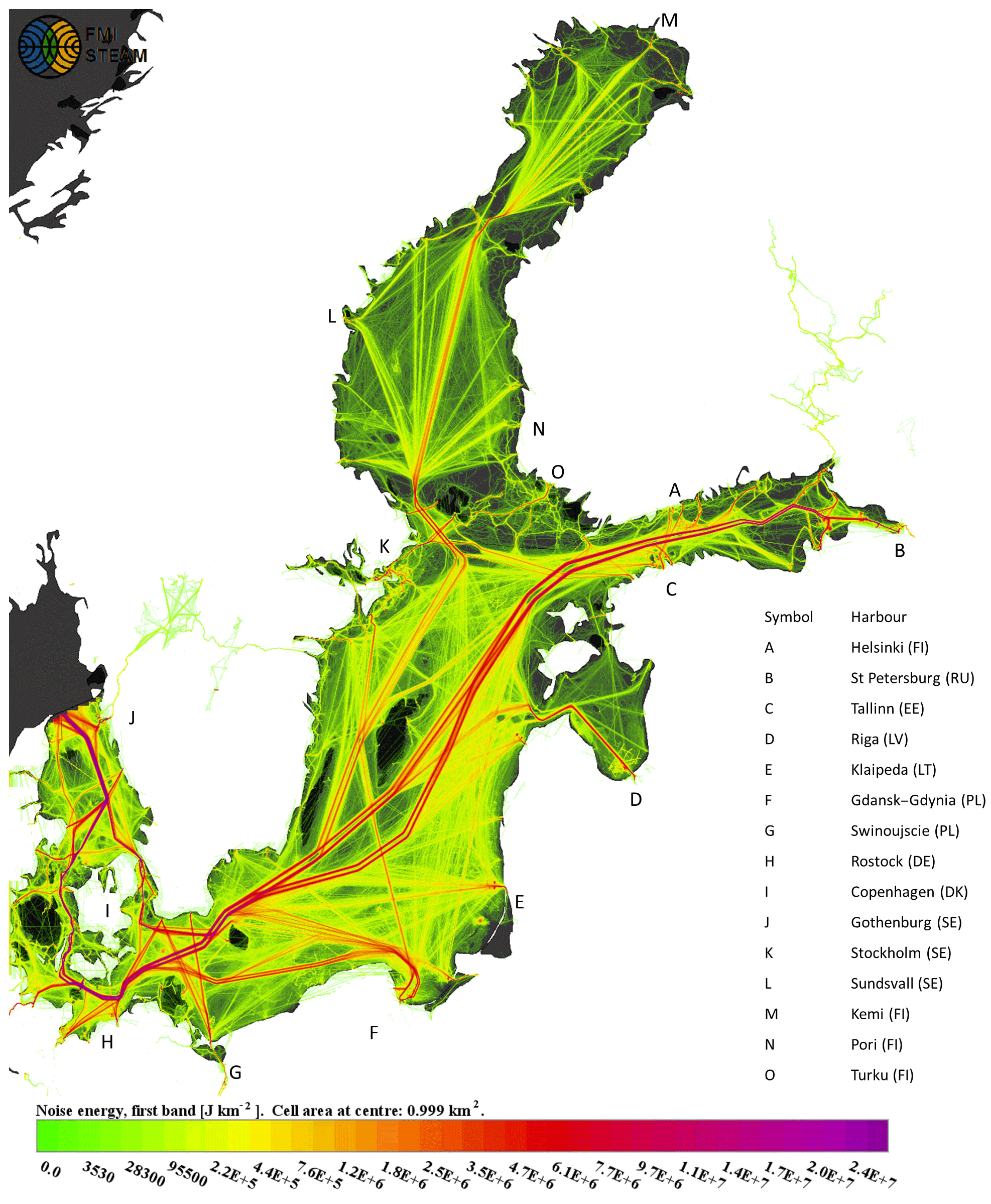
Figure 3Noise source map for Baltic Sea shipping. This map indicates the sum of sound energy in units of joules per grid cell (cell area 1 km2) during the year 2015.
Ships spend a significant portion of their active time in harbour areas (Smith et al., 2014). The time integration step in this study (Eq. 7) leads to a situation where harbour areas are represented as significant sources of underwater noise. This is a feature of the machinery contribution of the noise source description (see Eq. 4) which remains non-zero when ships are standing still. Using the current approach it is not possible to distinguish between ships standing still with engines on or off. The Wittekind noise source model is intended for moving vessels and the application of this model to stationary vessels would have been a clear extrapolation of the original intention. For this reason, we chose to only apply the time integration of sound power to moving ships. In STEAM, time integration of sound power is only applied to the cruising and manoeuvring modes of vessel operation, and stationary vessels do not contribute to total sound energy regardless of the fact that there may be auxiliary engines running during harbour visits which may contribute to the emitted underwater noise. Noise from auxiliary engines is not modelled in this approach even if it may be a significant source of atmospheric noise in harbour areas. Based on these definitions, a source emitting 1 MJ of noise in 1 year corresponds to a continuous monopole source with an approximate 156 dB re 1 µPa at 1 m sound pressure level, assuming that free-field approximation is valid.
3.1 Shipping noise emissions in the Baltic Sea region
The noise maps were generated for one-third octave bands which have 63, 125 and 2000 Hz central frequencies (Van der Graaf et al., 2012). The two lowest bands are relevant for various fish species, whereas the 2 kHz band is relevant for marine mammals (Nedwell et al., 2004; Nikopouloulos et al., 2016). Using the methodology described above, the noise source maps generated for Baltic Sea shipping in 2015 (for 63 Hz band) are depicted in Fig. 3.
As can be seen from Fig. 3 noise source maps have noise hotspots on the main shipping lane in the Danish straits, between the islands of Fyn and Sjælland. Furthermore, high sound energy values were estimated outside Kiel and Rostock harbours. The annual noise energy emitted in the 63 Hz band was 117 GJ during 2015, with the highest contributions from bulk cargo ships, container ships and tankers. Noise emissions were also observed to increase towards the end of 2015. Maximum monthly noise energy emissions were noted in December 2015, 32 GJ month−1, whereas the minimum was found to occur in February, 25 GJ month−1. These are summed energies over all three bands, 63, 125 and 2000 Hz. Daily noise energy emissions in January were 0.86 GJ day−1, although emissions exceed 1 GJ day−1 towards the end of 2015 (the daily maximum occurred in October, 1.07 GJ day−1). These results indicate a 20 % growth in noise energy emissions (in GJ, not dB) during 2015.
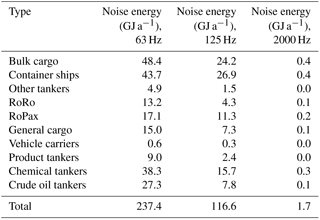
Plotting the noise energy emitted by each ship type, relative to the total noise energy emitted in each band, indicates that container ships and bulk cargo carriers are the two largest sources of underwater shipping noise in the Baltic Sea region. Container ships represent about 3 % of all ships, but are responsible for 27 % of the noise emitted in the 125 Hz band. Bulk cargo carriers also contribute a high share of noise emissions, but bulk carriers represent a larger share of the total number of ships (8 %). (Fig. 4; Table 1). Analogous to energy efficiency metrics, reported in grams of CO2 emitted per amount of cargo carried and distance travelled (in g t−1 km−1), the emitted noise energy should also be compared to transport work or distance travelled. If calculated this way, container ships represent 15 % of the transport work and emit 23 % of the noise energy (the sum of noise energy emitted in the 63, 125 and 2000 Hz bands). Regarding bulk cargo ships, the share of the noise energy emissions is 23 % and the share of the transport work carried out is 21 %. Considering the large share of the transport work, bulk and general cargo ships emit less noise than container ships. The largest discrepancies between noise energy emitted and distance travelled occur with RoPax vessels, which are responsible for 3 % of the transport work and contribute 9 % of the noise energy (the sum of energy over all three bands) emitted in the Baltic Sea region. If the noise efficiency index is defined as joules of noise energy emitted for each ton kilometre of cargo carried, the noise efficiency index in mJ t−1 km−1 is very high for RoPax vessels (920 mJ t−1 km−1), whereas for container ships and bulk carriers the noise efficiency indexes is 491 and 360 mJ t−1 km−1, respectively. With this metrics, lowest index is achieved with slow moving vessels, like general cargo carriers and crude oil tankers, which emit less than 200 mJ of noise energy per ton kilometre carried.
For most cargo ships VCIS is predicted to be close to 9 knots, except for container ships, and about one-quarter of these slow vessels sailed slower than their predicted cavitation inception speed in 2015 (Fig. 5). If the cargo carrying fleet in the Baltic Sea region returns to normal operation at speeds closer to ship's respective design speeds, it is very likely that a significant increase in noise energy will be seen for the quarter of the cargo fleet now operating below their VCIS. This increase could happen without increasing the fleet size at all. A significant portion of oil product tankers and cruise vessels were also found to be operating at speeds lower than their cavitation inception speed. It may very well be that the contribution from the oil tanker fleet may increase when the vessels that are currently operating below their design speed increase speed, although their overall contribution to sound power is quite low, only about 2 %. However, if the 20 % of container ships which operated under their VCIS in 2015 speed up, the resulting sound energy increase impact will be significant, as the container ship contribution to overall sound power is high. Voluntary speed reduction was also observed in the “Third IMO Greenhouse Gas Study” (Smith et al., 2014), especially in the container ship class. Speed reduction may occur in situations where vessels may not be fully loaded, when overcapacity in the market exists and when the costs can be lowered by sailing slower than the design speed. The required power and the fuel consumption are cubic functions of speed, and speed reductions may lead to significant savings if vessel schedules allow for them.
Table 1Noise energy emitted by various ship types in the Baltic Sea region during the year 2015. The top 10 contributors are reported and represent over 90 % of the noise energy emitted.
3.2 Uncertainty evaluation
Karasalo et al. (2017) tested the performance of the Wittekind noise source model using inverse modelling from hydrophone measurements. The transmission loss of the measured noise signature was modelled using XFEM code (Karasalo, 1994) to obtain the noise source at a reference distance. In their paper, Karasalo et al. (2017) observed a good fit between the Wittekind predictions and the observed signals for cargo ships, tankers and tugboats, but larger differences were observed for passenger and RoRo vessels, with the Wittekind model overestimating the noise source levels. It is very likely that this is because the Wittekind model was mainly intended for large ocean-going vessels with a single fixed pitch propeller or a single controllable pitch propeller that are operated close to their design pitch (Dietrich Wittekind, personal communication, October 2017).
The voluntary operation of a vessel at lower speeds (slow steaming) may work as a noise mitigation option for deep ocean vessels with a single fixed pitch propeller; however, this method may not be effective for ships equipped with controllable pitch (CP) propellers and may actually lead to higher than expected noise emissions (Wittekind, 2009).
.
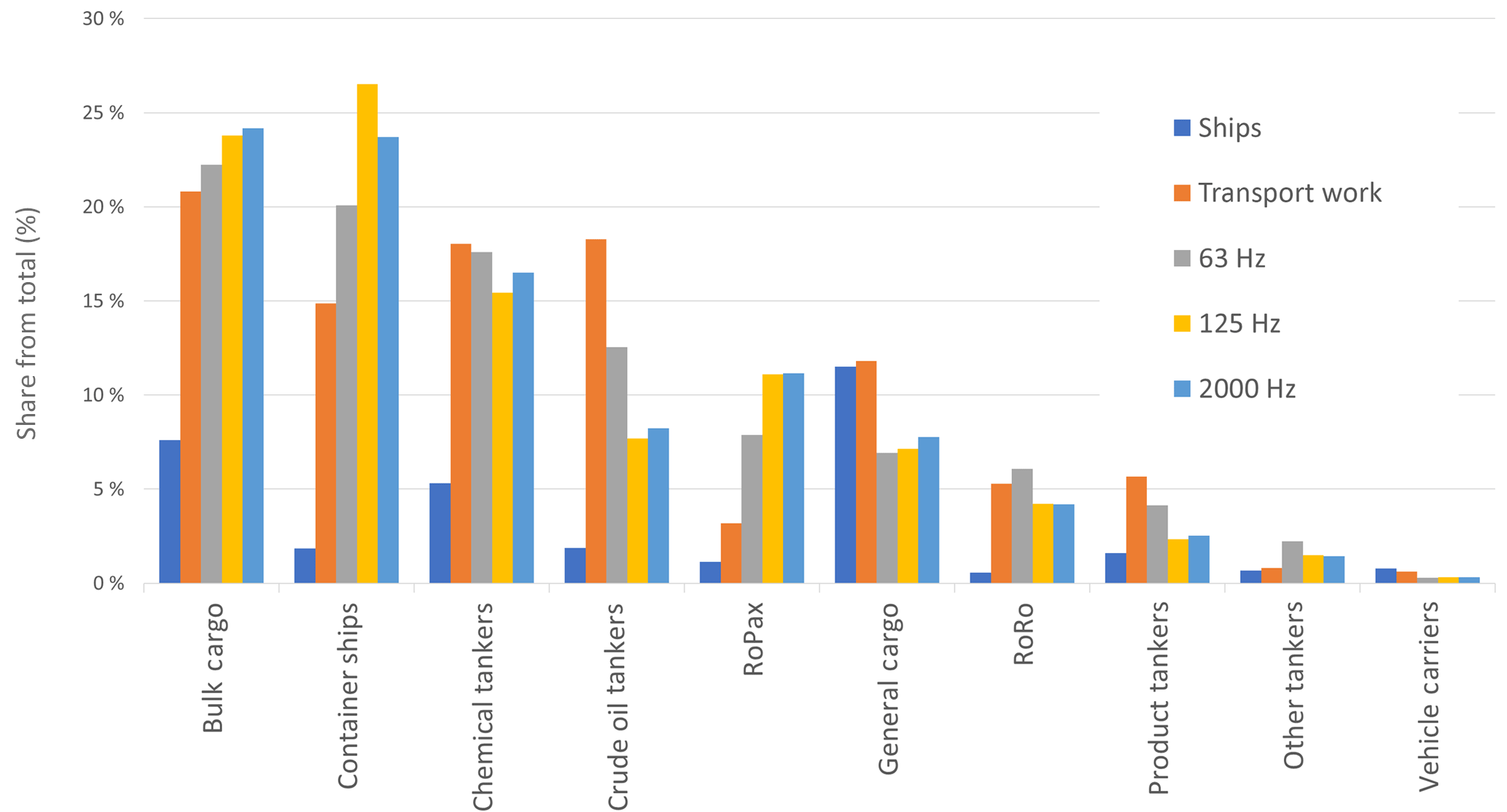
Figure 4Contribution of different ship types to annual emissions of underwater noise energy (share of energy emitted in the 63, 125 and 2000 Hz bands). The dark blue bar represents the share of the specific ship types with respect to all ships included in the study; orange represents the share of transport work; grey, yellow and light blue represent the share of noise energy emitted by ships in the 63, 125 and 2000 Hz bands, respectively with respect to the total energy
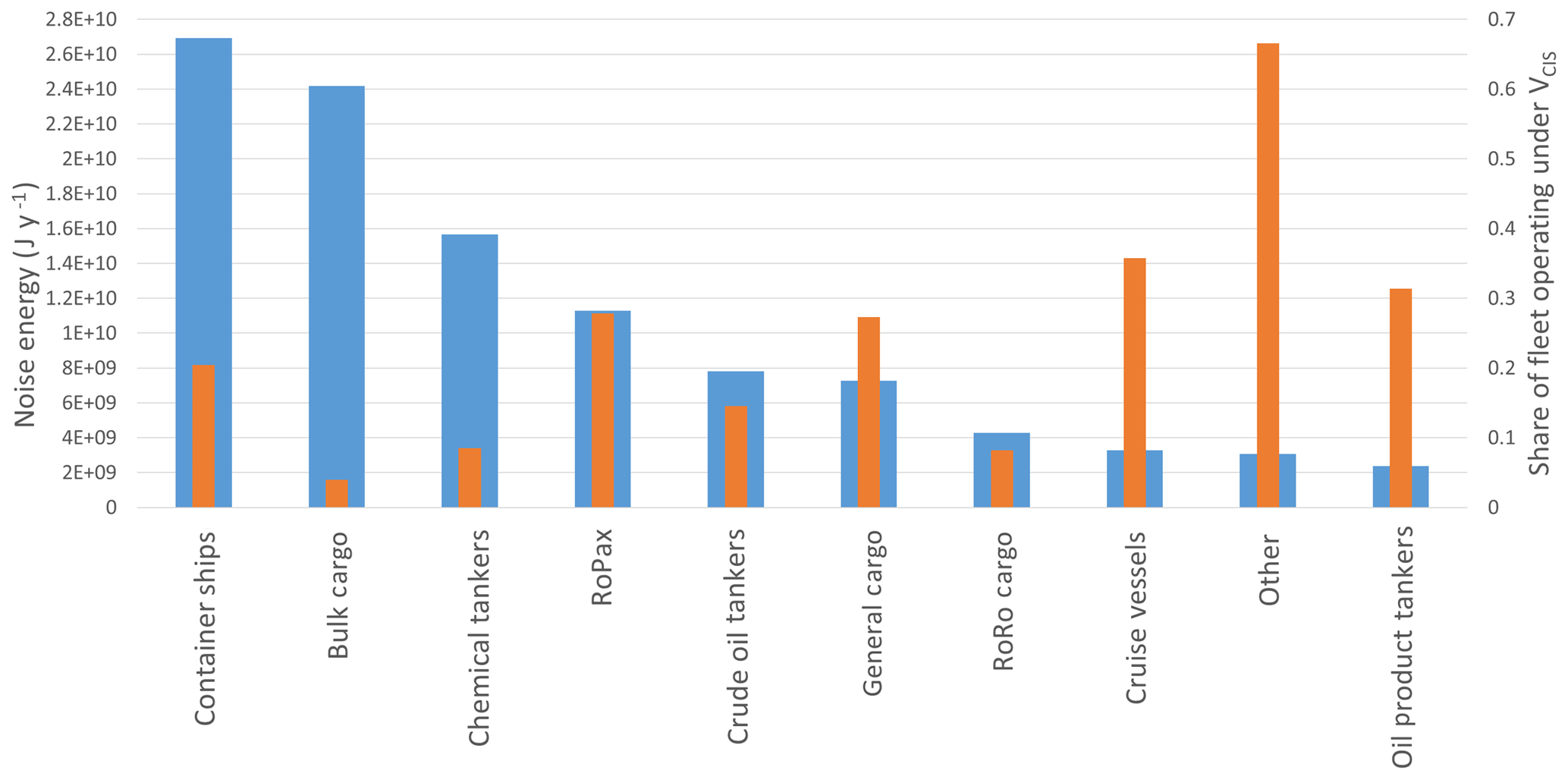
Figure 5Noise energy emitted by different ship types in 125 Hz frequency band (in joules per year; blue bars, left axis). The share of the fleet operating under their cavitation inception speed is also indicated (orange bars, right axis). For example, container ships are the biggest source of noise energy in the Baltic Sea fleet with 27 GJ, of sound power emitted. Of the container ship fleet, about 20 % operate at speeds lower than their predicted cavitation inception speed.
Significant uncertainty may be involved in the estimation of the cavitation inception speed (VCIS), which is not readily available directly from any of the ship databases and was estimated in this study using the vessel design speed and hull form (see Eq. 5). The contribution of VCIS to the vessel noise source level is significant, because at speeds below this threshold value vessel noise is notably lower. We tested the impact of VCIS uncertainty by testing the sensitivity of predicted noise to VCIS; this was done by altering the lower and upper bounds of Eq. (5) to 10 and 15 knots, respectively. This change increased the speed at which the propellers cavitated and, therefore, led to larger portion of the fleet operating under non-cavitating conditions than the default assumption. The differences in the predicted noise energy in the Baltic Sea region were most pronounced in the low-frequency band (63 Hz), where the total noise energy emitted decreased by 26 % when higher values of VCIS were applied. For all frequency bands considered, the total reduction was 19 %. The sum of the energy emitted at higher frequency bands also decreased by 7 % for both the 125 and 2000 Hz bands, respectively. The change in the cavitation speed range only altered the noise energy emissions from RoPax ships by 7 %, whilst the results for passenger cruise vessels were unchanged. This is probably because RoPax and cruise vessels mostly operate at speeds faster than 15 knots, and cavitation still occurs regardless of the higher VCIS tested here. For container ships, noise emissions were reduced by 19 %, but the largest changes (−39 %) occurred in the tanker class. Contributions from other slow moving vessels, like cargo ships, were also significantly reduced (−27 %).
The uncertainty concerning the estimation of VCIS can be reduced with more in-depth research on cavitation inception. Findings from such studies should be released as open access reports and data sets to facilitate further research on underwater noise emissions. In case of controllable pitch (CP) propellers the speed of the vessel is regulated with the propeller pitch and not necessarily by adjusting the rotational speed of the propeller. Without additional information about the marine propellers used by the ships it is difficult to assess the details of cavitation. Modern passenger vessels are usually equipped with multiple four-stroke engines and have more than one propeller, often CP propellers. In 2015, about 10 % of the vessels sailing the Baltic Sea were equipped with two or more propellers, and the contribution of these ship types to the total noise energy in the 125 Hz frequency band was around 13 %. It is likely that the accuracy of the noise emission estimations for the passenger vessel fleet is worse than that of the cargo ships, but this does not change the main conclusions of this paper.
The Wittekind model was built for vessels with a single propeller and a four-stroke main engine. The application of the Wittekind model to large two-stroke engines, which commonly propel the global fleet, may lead to increased uncertainty in predicted source levels. Most (82 %) of the commercially operated vessels in the Baltic Sea use four-stroke engines and the great majority (90 %) is equipped with a single propeller. The Wittekind model also does not include contributions from auxiliary engines, which may be a significant noise source in port areas. This was one of the reasons that this contribution was exempted from the time integration of noise energy. Neglecting the continuous time integration during harbour visits also produces some uncertainty in the final results, but the magnitude of this contribution is difficult to estimate as the current approach is not able to distinguish between ships anchored with their engines shut down and ships anchored with their engines running. It is very likely that harbour areas are not significant fish or marine mammal habitats, which should reduce the significance of this uncertainty concerning the consequent noise impact assessments on marine life.
Underwater noise is rarely a design parameter for new ships, unless warships or research vessels are considered, and only voluntary guidelines to mitigate vessel noise exist. Currently, for the commercial fleet, the efficiency of the propeller is more important than low noise emissions, and these two conflicting requirements may lead to worse noise problems in the future when more energy efficient designs are required. Cavitation of propellers is usually avoided to alleviate mechanical problems arising from erosion, not to mitigate noise emissions.
A methodology was presented to derive underwater noise emissions from ship activity and technical data. This facilitates annual updates of noise source maps for the 63, 125 and 2000 Hz frequency bands regardless of the study scale. With global AIS data, global noise source studies are also possible.
During 2015 the most significant noise sources in the Baltic Sea were bulk carriers and container ships. Container vessels represented about 3 % of the total number of IMO registered vessels, but were responsible for one-quarter of the noise energy emitted; this makes them the largest contributor to vessel noise in the Baltic Sea region. It was discovered that about 20 % of container ships currently operate at speeds below the estimated cavitation inception speed. If these vessels were to increase their operating speed to levels closer to their design speed, a significant increase in underwater noise may occur in the Baltic Sea region without any increase in the fleet size. However, the container ship share of the total transport work is almost as large as the container ship noise contribution. Considering the distances travelled and cargo carried, RoPax vessels have a disproportionally large contribution to vessel noise. It is unclear how well the current approach can be applied in multi-propeller, multi-engine cases for which the Wittekind noise model was not originally intended. Further work is needed to understand the performance of current noise modelling tools in these cases.
It is unclear what kind of physical impact the current level of shipping noise has on marine life in the Baltic Sea. Shipping is only one source of underwater noise and many other sources exist, both natural and anthropogenic. Noise is not routinely monitored, but it is measured in many research projects concentrating on underwater noise. There are no long-term observations of noise that could be used to determine how noise levels have developed in the Baltic Sea in the past, but AIS data are available for at least the last decade. This allows for noise modelling studies covering this period. In general, modelling must rely on robust experimental data, which should be available to assess the performance of the modelling work. Currently, only limited opportunities to do this exist from a handful of research projects; therefore, national measurement networks and international cooperation are needed.
The noise source emission maps in netcdf format are available in the Data Dryad service: https://doi.org/10.5061/dryad.nt22g30.
The supplement related to this article is available online at: https://doi.org/10.5194/os-14-1373-2018-supplement.
JPJ was responsible for the overall coordination of the work, the Wittekind noise model adaptation for STEAM and was the main contributor to this paper. LJ was responsible for the technical implementation of the noise module and for running the STEAM model. ML and RB provided technical expertise regarding the noise model selection and adaptation. PS, MÖ, IK and MA were responsible for developing a methodology for the noise source mapping and the consecutive noise propagation modelling, which contributed to the uncertainty evaluation. HP and JP provided expertise on the relevant impacts of noise on marine life and contributed to noise source mapping method development.
The authors declare that they have no conflict of interest.
This article is part of the special issue “Shipping and the Environment – From Regional to Global Perspectives (ACP/OS inter-journal SI)”. It is a result of the Shipping and the Environment – From Regional to Global Perspectives, Gothenburg, Sweden, 23–24 October 2017.
This work resulted from the BONUS SHEBA project and was supported by
BONUS (Art 185), which is jointly funded by the EU, the Academy of Finland, the Swedish
Agency for Marine and Water Management, the Swedish Environmental Protection
Agency and FORMAS. We are grateful to the HELCOM member states for allowing
the use of HELCOM AIS data in this research.
Edited by: John M. Huthnance
Reviewed by: Jan Hallander, Dietrich Wittekind, Martin Gassmann and Adrian Farcas
Arveson, P. T. and Vendittis, D. J.: Radiated noise characteristics of a modern cargo ship, J. Acoust. Soc. Am., 107, 118–129, https://doi.org/10.1121/1.428344, 2000.
Audoly, C., Rousset, C., Rizzuto, E., Mullor, R. S., Hallander, J., and Baudin, E.: Mitigation measures for controlling the ship underwater radiated noise, in the scope of AQUO project, MTS/IEEE Ocean. 2015 – Genova Discov. Sustain, Ocean Energy a New World, https://doi.org/10.1109/OCEANS-Genova.2015.7271381, 2015.
Barnes, J., Langdon, M., Tolley, K., Wall, L., and Skelton, M.: Marine Engines 2005 – Motorship Supplement, Motorship, 2005.
Carlton, J.: Marine Propellers and Propulsion, Third Edit., Elsevier Ltd, Oxford, UK, 2010.
European Parliament and Council of the European Union: Directive 2008/56/EC of the European Parliament and of the Council, Off. J. Eur. Union, 164, 19–40, https://doi.org/10.1016/j.biocon.2008.10.006, 2008.
Gaggero, T., Rizzuto, E., Karasalo, I., Östberg, M., Folegot, T., Six, L., van der Schaar, M., and Andre, M.: Validation of a simulation tool for ship traffic noise, in Oceans'15, IEEE, 2015.
Hatch, L., Clark, C., Merrick, R., Van Parijs, S., Ponirakis, D., Schwehr, K., Thompson, M., and Wiley, D.: Characterizing the relative contributions of large vessels to total ocean noise fields: A case study using the Gerry E. studds stellwagen bank national marine sanctuary, Environ. Manage., 42, 735–752, https://doi.org/10.1007/s00267-008-9169-4, 2008.
Hildebrand, J.: Sources of Anthropogenic Sound in the Marine Environment, Rep. to Policy Sound Mar. Mamm. An Int. Work. US Mar. Mammal Comm. Jt. Nat. Conserv. Comm. UK London Engl., 50, 1–16, https://doi.org/10.1016/j.marpolbul.2004.11.041, 2004.
Hildebrand, J. A.: Anthropogenic and natural sources of ambient noise in the ocean, Mar. Ecol. Prog. Ser., 395, 5–20, https://doi.org/10.3354/meps08353, 2009.
IHS_Global: SeaWeb database of the global ship fleet, SEAWEB data product, IHS Fairplay, 2016.
IMO: 2014 GUIDELINES ON THE METHOD OF CALCULATION OF THE ATTAINED ENERGY EFFICIENCY DESIGN INDEX (EEDI) FOR NEW SHIPS, International Maritime Organization, 66th meeting of the Marine Environment Protection Committee (IMO MEPC), MEPC 66/21/Add. 1, IMO headquarters in London, April 2014.
IMO SDC: PROVISIONS FOR REDUCTION OF NOISE FROM COMMERCIAL SHIPPING AND ITS ADVERSE IMPACTS ON MARINE LIFE, International Maritime Organization, 57th meeting of the Sub-Committee on Ship Design and Construction (DE57), DE 57/17, IMO headquaters in London, March 2013.
Jalkanen, J.-P., Brink, A., Kalli, J., Pettersson, H., Kukkonen, J., and Stipa, T.: A modelling system for the exhaust emissions of marine traffic and its application in the Baltic Sea area, Atmos. Chem. Phys., 9, 9209–9223, https://doi.org/10.5194/acp-9-9209-2009, 2009.
Jalkanen, J.-P., Johansson, L., Kukkonen, J., Brink, A., Kalli, J., and Stipa, T.: Extension of an assessment model of ship traffic exhaust emissions for particulate matter and carbon monoxide, Atmos. Chem. Phys., 12, 2641–2659, https://doi.org/10.5194/acp-12-2641-2012, 2012.
Johansson, L., Jalkanen, J.-P., Kalli, J., and Kukkonen, J.: The evolution of shipping emissions and the costs of regulation changes in the northern EU area, Atmos. Chem. Phys., 13, 11375–11389, https://doi.org/10.5194/acp-13-11375-2013, 2013.
Johansson, L., Jalkanen, J. P., and Kukkonen, J.: Global assessment of shipping emissions in 2015 on a high spatial and temporal resolution, Atmos. Environ., 167, 403–415, https://doi.org/10.1016/j.atmosenv.2017.08.042, 2017.
Karasalo, I.: Exact finite elements for wave propagation in range-independent fluid-solid media, J. Sound Vib., 172, 671–688, 1994.
Karasalo, I., Östberg, M., Sigray, P., Jalkanen, J.-P., Johansson, L., Liefvendahl, M., and Bensow, R.: Estimates of source spectra of ships from long term recordings in the Baltic sea, Front. Mar. Sci., 4, 164, https://doi.org/10.3389/fmars.2017.00164, 2017.
Kipple, B.: Southeast Alaska cruise ship underwater acoustic noise, NSWC Rep., (NSWCCD-71-TR-2002/574), available at: http://www.nps.gov/glba/naturescience/whale_acoustic_reports.htm#Acoustic (last access: 19 October 2018), 2002.
Kuiken, K.: Diesel engines for ship propulsion and power plants-I, Target Global Energy Training, Onnen, the Netherlands, 2008.
Leaper, R., Renilson, M., and Ryan, C.: Shhh ... do you hear that?, J. Ocean Technol., 9, 50–69, 2014.
McKenna, M. F., Ross, D., Wiggins, S. M., and Hildebrand, J. A.: Underwater radiated noise from modern commercial ships, J. Acoust. Soc. Am., 131, 92–103, https://doi.org/10.1121/1.3664100, 2012.
Moore, S. E., Reeves, R. R., Southall, B. L., Ragen, T. J., Suydam, R. S., and Clark, C. W.: A New Framework for Assessing the Effects of Anthropogenic Sound on Marine Mammals in a Rapidly Changing Arctic, Bioscience, 62, 289–295, https://doi.org/10.1525/bio.2012.62.3.10, 2012.
Nedwell, J. R., Edwards, B., Turnpenny, A. W. H., and Gordon, J.: Fish and Marine Mammal Audiograms?: A summary of available information, Subacoustech Rep. ref 534R0214, (September 2004), 281, 2004.
Nikopouloulos, A., Sigray, P., Andersson, M., and Carlström, J. L. E.: BIAS Implementation Plan – Monitoring and assessment guiance for continuous low frequency sound in the Baltic Sea, available at: http://www.diva-portal.org/smash/get/diva2:1072183/FULLTEXT01.pdf (last access: 19 October 2018), 2016.
Rolland, R. M., Parks, S. E., Hunt, K. E., Castellote, M., Corkeron, P. J., Nowacek, D. P., Wasser, S. K., and Kraus, S. D.: Evidence that ship noise increases stress in right whales, Proc. Biol. Sci., 279, 2363–2368, https://doi.org/10.1098/rspb.2011.2429, 2012.
Rowen, A. L.: Chapter 24. Machinery Considerations, in Ship Design & Construction, Vol 1, edited by: Lamb, T., The Society of Naval Architects and Engineers (SNAME), Jersey City, NJ, 2003.
Smith, T. W. P., Jalkanen, J. P., Anderson, B. A., Corbett, J. J., Faber, J., Hanayama, S., O'Keeffe, E., Parker, S., Johansson, L., Aldous, L., Raucci, C., Traut, M., Ettinger, S., Nelissen, D., Lee, D. S., Ng, S., Agrawal, A., Winebrake, J. J., Hoen, M., Chesworth, S., and Pandey, A.: Third IMO GHG Study 2014, International Maritime Organisation (IMO) London, UK, June 2014.
Van der Graaf, A. J., Ainslie, M. A., André, M., Brensing, K., Dalen, J., Dekeling, R. P. A., Robinson, S., Tasker, M. L., Thomsen, F., and Werner, S.: European Marine Strategy Framework Directive – Good Environmental Status (MSFD GES): Report of the Technical Subgroup on Underwater noise and other forms of energy, available at: http://ec.europa.eu/environment/marine/pdf/MSFD_reportTSG_Noise.pdf (last access: 5 November 2018), 2012.
Wales, S. C. and Heitmeyer, R. M.: An ensemble source spectra model for merchant ship-radiated noise, J. Acoust. Soc. Am., 111, 1211–1231, https://doi.org/10.1121/1.1427355, 2002.
Wartsila: Wartsila 46DF Product Guide, Technical documentation for Wartsila 46DF engine, available at: https://cdn.wartsila.com/docs/default-source/product-files/engines/df-engine/product-guide-o-e-w46df.pdf?sfvrsn=9 (last access: 19 October 2018), 2016.
Wärtsilä: Wärtsilä 50DF Product Guide, Technical documentation for Wartsila 50DF engine, available at: https://cdn.wartsila.com/docs/default-source/product-files/engines/df-engine/product-guide-o-e-w50df.pdf?sfvrsn=9 (last access: 19 October 2018), 2012.
Wärtsilä: Wärtsilä 32 Product Guide, Technical documentation for Wartsila 32 engine, available at: https://www.wartsila.com/docs/default-source/product-files/engines/ms-engine/product-guide-o-e-w32.pdf?utm_source=engines&utm_medium=dieselengines&utm_term=w32&utm_content=productguide&utm_campaign=msleadscoring (last access: 19 October 2018), 2015.
Watson, D. G. M.: Practical Ship Design, in: Elsevier Ocean Engineering Series Volume 1, ISBN-13: 978-0080429991, ISBN-10: 0080429998, Elsevier Science, Oxford, UK, 1998.
Wittekind, D.: The Increasing Noise Level in the Sea – a Challenge for Ship Technology?, Paper given at the 104 th Congress of the German Society for Maritime Technology What causes the noise level in the What is the cause of shipping noise?, in 104th Congress of the German Society for Marine Technology, p. 8, available at: https://www.iqoe.org/sites/default/files/files/Wittekind.pdf (last access: 19 October 2018), 2009.
Wittekind, D. K.: A simple model for the underwater noise source level of ships, J. Sh. Prod. Des., 30, 1–8, https://doi.org/10.5957/JSPD.30.1.120052, 2014.
Yang, W.-C., Chou, L.-S., Jepson, P. D., Brownell, R. L., Cowan, D., Chang, P.-H., Chiou, H.-I., Yao, C.-J., Yamada, T. K., Chiu, J.-T., Wang, P.-J., and Fernández, A.: Unusual cetacean mortality event in Taiwan, possibly linked to naval activities., Vet. Rec., 162, 184–186, https://doi.org/10.1136/vr.162.6.184, 2008.